A los alumnos de Tecnología Industrial II, aquí os presento la segunda parte de los apuntes relativos a los «Motores eléctricos». En ella se presentan los contenidos que os ayudarán a resolver los problemas que trabajaremos en el área, así como una definición de los tipos de motores eléctricos de corriente continua en función de los devanados y su posición relativa.
También tenéis una tanda de ejercicios de Motores eléctricos
Para los alumnos de Bachillerato. Tenéis a vuestra disposición los apuntes con los contenidos sobre elementos de máquinas y sistemas. En concreto, nos centraremos en los mecanismos como elementos básicos de cualquier máquina. Espero que les saquéis partido.
El mecanismo tornillo-tuerca, conocido también como husillo-tuerca es un mecanismo de transformación de circular a lineal compuesto por una tuerca alojada en un eje roscado (tornillo).
Si el tornillo gira y se mantiene fija lo orientación de la tuerca, el tornillo avanza con movimiento rectilíneo dentro de ella.
Por otra parte, si se hace girar la tuerca, manteniendo fija la orientación del tornillo, aquella avanzará por fuera de ésta. Este mecanismo es muy común en nuestro entorno, pues lo podemos encontrar en infinidad de máquinas y artilugios.
Evidentemente, este mecanismo es irreversible, es decir, no se puede convertir el movimiento lineal de ninguno de los elementos en circular.
El avance depende depende de dos factores:
La velocidad de giro del elemento motriz.
El paso de la rosca del tornillo, es decir, la distancia que existe entre dos crestas de la rosca del tornillo. Cuando mayor sea el paso, mayor será la velocidad de avance.
Veamos algunos instrumentos que incorporan este mecanismo:
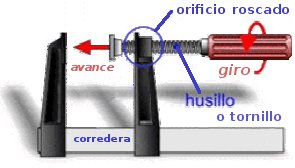
El sargento: Esta herramienta de sujeción de piezas que se van a mecanizar, muy común en cualquier aula de tecnología, tiene este mecanismo como elemento esencial. En este caso, el elemento motriz es el tornillo que, al girarlo manualmente, avanza dentro de la tuerca que posee el brazo de la corredera.
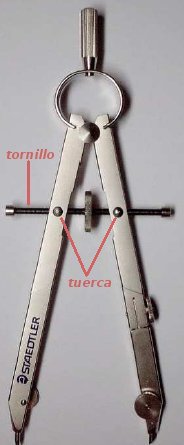
La bigotera: Este instrumento, muy común en las clases de plástica, regula la abertura de sus brazos gracias al giro de un tornillo que mantiene su posición y que actúa como elemento motriz. Las tuercas se encuentran en los brazos del compás, las cuales avanzan dentro del tornillo.
El gato mecánico: En este caso, al girar la manivela, gira la tuerca, que actúa como elemento motriz y, a la vez, avanza por el tornillo linealmente de forma que se cierran las barras articuladas que levantan el automóvil.
El grifo de rosca: El elemento es el mando giratorio del grifo, acoplado a un tornillo (elemento motriz) que avanza linealmente y gira dentro de una tuerca. En el extremo del tornillo hay una zapata de caucho que termina cerrando el paso al agua.
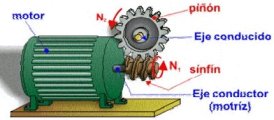
El tornillo sinfin es un mecanismo de transmisión circular compuesto por dos elementos: el tornillo (sinfín), que actúa como elemento de entrada (o motriz) y la rueda dentada, que actúa como elemento de salida (o conducido) y que algunos autores llaman corona. La rosca del tornillo engrana con los dientes de la rueda de modo que los ejes de transmisión de ambos son perpendiculares entre sí.
El funcionamiento es muy simple: por cada vuelta del tornillo, el engranaje gira un solo diente o lo que es lo mismo, para que la rueda dé una vuelta completa, es necesario que el tornillo gire tantas veces como dientes tiene el engranaje. Se puede deducir de todo ello que el sistema posee una relación de transmisión muy baja, o lo que es lo mismo, es un excelente reductor de velocidad y, por lo tanto, posee elevada ganancia mecánica. Además de esto, posee otra gran ventaja, y es el reducido espacio que ocupa.
Eltornilloes considerado una rueda dentada con un solo diente que ha sido tallado helicoidalmente (en forma de hélice). A partir de esta idea, se puede deducir la expresión que calcula la relación de transmisión:
donde Z representa el número de dientes del engranaje.
Veamos un ejemplo: supongamos que la rueda tiene 60 dientes. En este caso, el tornillo debe dar 60 vueltas para el engranaje complete una sola vuelta y, por lo tanto, la relación de transmisión del mecanismo es
Este mecanismo no es reversible, es decir, la rueda no puede mover el tornillo porque se bloquea.
Aplicaciones:
El tornillo sinfín en las clavijas de una guitarra
En nuestra vida cotidiana lo podemos ver claramente en las clavijas de una guitarra. En este caso, la cuerda es recogida con presición por eje de transmisión de una pequeña rueda dentada que es conducida por un tornillo que gira gracias a la acción de la clavija.
No podemos olvidar el limpiaparabrisas, que se acciona gracias a este mecanismo.
En los siguiente vídeos veréis el mecanismo en acción. En ambos observa lo lento que gira la rueda dentada y fíjate cómo en el primer vídeo se intenta girar el tornillo accionando el engranaje. Es imposible.
Tenéis a vuestra disposición los apuntes de mecanismos de transformación del movimiento que trabajaremos pronto. Podeís bajar los apuntes y tenerlos dispuestos para el día que tengamos clase.
Para los alumnos de segundo ESO, tenéis a vuestra disposición los apuntes del próximo tema que trabajaremos en clase: los mecanismos. Este tema os introducirá en el mundo de la mecánica y os ayudará a entender cómo funcionan diversas máquinas que utilizamos cada día, desde un reloj hasta el motor de un automóvil.
El sistema de poleas con correa más simple consiste en dos poleas situadas a cierta distancia, que giran a la vez por efecto del rozamiento de una correa con ambas poleas. Las correas suelen ser cintas de cuero flexibles y resistentes. Es este un sistema de transmisión circular puesto que ambas poleas poseen movimiento circular.
En base a esta definición distinguimos claramente los siguientes elementos:
Sistema de poleas con correa
1. La polea motriz: también llamada polea conductora: Es la polea ajustada al eje que tiene movimiento propio, causado por un motor, manivela,
… En definitiva, este eje conductor posee el movimiento que deseamos transmitir.
2. Polea conducida: Es la polea ajustada al eje que tenemos que mover. Así, por ejemplo: en una lavadora este eje será aquel ajustado al tambor que contiene la ropa.
3. La correa de transmisión: Es una cinta o tira cerrada de cuero, caucho u otro material flexible que permite la transmisión del movimiento entre ambas poleas. La correa debe mantenerse lo suficientemente tensa pues, de otro modo, no cumpliría su cometido satisfactoriamente.
Según el tamaño de las poleas tenemos dos tipos:
1. Sistema reductor de velocidad: En este caso, la velocidad de la polea conducida ( o de salida) es menor que la velocidad de la polea motriz (o de salida). Esto se debe a que la polea conducida es mayor que la polea motriz.
En el siguiente vídeo se puede apreciar un mecanismo reductor de poleas con correa. Observa como la polea motriz es menor que la polea conducida la cual gira a mayor velocidad.
Con la correa cruzada se puede lograr que el sentido de giro de la polea conducida sea contrario al de la polea motriz.
2. Sistema multiplicador de velocidad: En este caso, la velocidad de la polea conducida es mayor que la velocidad de la polea motriz. Esto se debe a que la polea conducida es menor que la polea motriz.
La velocidad de las ruedas se mide normalmente en revoluciones por minuto (rpm) o vueltas por minuto.
Los sistemas de poleas con correa presentan una serie de ventajas que hacen que hoy en día sean de uso habitual. Veamos algunas de ellas:
Posibilidad de transmitir un movimiento circular entre dos ejes situados a grandes distancias entre sí.
Funcionamiento suave y silencioso.
Diseño sencillo y costo de fabricación bajo.
Si el mecanismo se atasca la correa puede desprenderse y, de este modo, se para. Este efecto contribuye a la seguridad probada de muchas máquinas que emplean este mecanismo como pueden ser taladros industriales.
Sin embargo, también este sistema presenta algunos inconvenientes:
La primera de las ventajas puede ser una desventaja, es decir, este mecanismo ocupa demasiado espacio.
La correa puede patinar si la velocidad es muy alta con lo cual no se garantiza una transmisión efectiva.
La potencia que se puede transmitir es limitada.
Aplicaciones: Este mecanismo es esencial en los motores de los automóviles, pues la transmisión circular entre diferentes ejes de los mismos se hacen con correas. Hemos oído hablar multitud de veces de la correa de transmisión (o de distribución) del coche. Pues bien, es esencial para el funcionamiento del ventilador de refrigeración, el alternador,…
Definición: Definimos la relación de transmisión (i) como la relación que existe entre la velocidad de la polea salida (n2) y la velocidad de la polea de entrada (n1).
La relación de transmisión, como su nombre indica, es una relación de dos cifras, no una división.
Ejemplo 1 : Supongamos un sistema reductor de modo que:
n1 = velocidad de la polea motriz (entrada) es de 400 rpm.
n2 = velocidad de la polea conducida (entrada) es de 100 rpm.
En este caso, la relación de transmisión es:
(tras simplificar)
Una relación de transmisión 1:4 significa que la velocidad de la rueda de salida es cuatro veces menor que la de entrada.
Ejemplo 2 : Supongamos un sistema multiplicador de modo que:
n1 = velocidad de la polea motriz (entrada) es de 100 rpm.
n2 = velocidad de la polea conducida (salida) es de 500 rpm.
En este caso, la relación de transmisión es:
(tras simplificar)
Una relación de transmisión 5:1 significa que la velocidad de la rueda de salida es cinco veces mayor que la de entrada. Nota que la relación es 5/1 y no 5, pues ambos número nunca debendividirse entre sí (todo lo más simplificarse).
La relación de transmisión también se puede calcular teniendo en cuenta el tamaño o diámetrode las poleas.
donde
d1 = diámetro de la polea motriz (entrada).
d2 = diámetro de la polea conducida (salida).
Se puede calcular las velocidad de las poleas a partir de los tamaños de las mismas
n1·d1 = n2·d2
expresión que también se puede colocar como…
Ejemplo:
Tengo un sistema de poleas de modo que:
La polea de salida tiene 40 cm de diámetro y la de entrada 2 cm de diámetro. Si la polea de entrada gira a 200 rpm
a) Halla la relación de transmisión
b) Halla la velocidad de la polea de salida
c) ¿Es un reductor o un multiplicador?
Datos:
n1 = velocidad de la polea entrada es de 200 rpm.
n2 = velocidad de la polea salida es la incógnita
d1 = diámetro de la polea entrada es 2 cm
d2 = diámetro de la polea salida es 40 cm
a)
b) n1·d1 = n2·d2 = 200 rpm·2 cm = n2·40 cm
c) Es un reductor porque la velocidad de la polea de salida es menor que la velocidad de la polea de entrada (n2 < n1).
En la siguiente animación observarás un mecanismo de poleas con correa reductor, suponiendo que la polea de la izquierda sea la motriz. Al ser el diámetro de la polea conducida d2 = 40 mm y el de la polea motriz d1 = 20 mm, la relación de transmisión de este sistema es
de este modo se puede concluir que dos giros de la polea motriz equivalen a un solo giro de la polea conducida.
En la siguiente animación podrás observar un mecanismo de poleas con correa multiplicador. El diámetro de la polea motriz es de d1=40 mm , mientras que la polea conducida tiene un diámetro de d2= 20 mm. Así pues la relación de transmisión de este sistema es
de este modo se puede concluir que un giro de la polea motriz equivale a dos giros de la polea conducida.
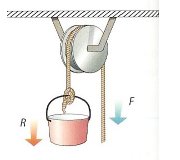
Una polea es una rueda que tiene un ranura o acanaladura en su periferia, que gira alrededor de un eje que pasa por su centro. Esta ranura sirve para que, a través de ella, pase una cuerda que permite vencer una carga o resistencia R, atada a uno de sus extremos, ejerciendo una potencia o fuerza F, en el otro extremo. De este modo podemos elevar pesos de forma cómoda e, incluso, con menor esfuerzo, hasta cierta altura. Es un sistema de transmisión lineal puesto que resistencia y potencia poseen tal movimiento.
Podemos distinguir tres tipos básicos de poleas:
a) Polea fija: Como su nombre indica, consiste en una sola polea que está fija a algún lugar. Con ella no se gana en Fuerza, pero se emplea para cambiar el sentido de la fuerza haciendo más cómodo el levantamiento de cargas al tirar hacia abajo en vez de para arriba, entre otros motivos porque nos podemos ayudar de nuestro propio peso para efectuar el esfuerzo. La fuerza que tenemos que hacer es igual al peso que tenemos que levantar (no hay ventaja mecánica) F=R. Así, por ejemplo, si deseo elevar una carga de 40 kg de peso, debo ejercer una fuerza en el otro extremo de la cuerda de, igualmente, 40 kg.
Polea móvil
b) Polea móvil: Es un conjunto de dos poleas, una de las cuales es fija, mientras que la otra es móvil. La polea móvil dispone de un sistema armadura-gancho que le permite arrastrar la carga consigo al tirar de la cuerda. La principal ventaja de este sistema de poleas es que el esfuerzo que se emplea para elevar la carga representa la mitad del que haría si emplease una polea fija. Así, por ejemplo, si quisiera elevar una carga de 40 kg de peso, basta con ejercer una fuerza de tan sólo 20 kg.
Polea móvil con una sóla polea
Esto supone que la cuerda que emplee para este mecanismo pueden ser la mitad de resistentes que en el caso anterior. Sin embargo, presenta una desventaja: El recorrido que debe hacer la cuerda para elevar la carga una altura determinada (h) debe ser el doble de la altura buscada (2h).
Aunque consta de dos poleas, en realidad se puede construir este mecanismo con una sola polea (observa la imagen de la derecha). Para ello se debe fijar un extremo de la cuerda, la carga a la polea y tirar de la cuerda de forma ascendente. Precisamente, este es la desventaja, mientras que en el caso de emplear dos poleas, este problema desaparece.
c) Sistemas de poleas compuestas: Existen sistemas con múltiples de poleas que pretenden obtener una gran ventaja mecánica, es decir, elevar grandes pesos con un bajo esfuerzo. Estos sistemas de poleas son diversos, aunque tienen algo en común, en cualquier caso se agrupan en grupos de poleas fijas y móviles: destacan los polipastos:
Polipasto: Este mecanismo está formado por grupos de poleas fijas y móviles, cada uno de ellos formado a su vez por un conjunto de
Polipasto
poleas de diámetro decreciente y ejes paralelos entre sí que se montan sobre la misma armadura, de modo que existe el mismo número de poleas fijas que móviles.
El extremo de la cuerda se sujeta al gancho de la armadura fija y se pasa alternativamente por las ranuras de las poleas —de menor a mayor diámetro en el caso del polispasto— comenzando por la del grupo móvil y terminando en la polea fija mayor o extrema donde quedará libre el tramo de cuerda del que se tira. La expresión que nos indica el esfuerzo que se debe realizar para vencer una carga (o resistencia) es las siguiente:
siendo n el número de poleas fijas del polipasto. Así, por ejemplo, si disponemos de un polipasto de tres poleas móviles, el esfuerzo que debo realizar para elevar una carga es seis veces menor (2n = 2·3 =6). Suponiendo que la carga sea, por poner un ejemplo, de 60 kg… el esfuerzo que deberíamos efectuar en este caso es de 10 kg.
Otro modelo de polipasto es aquel que emplea dos ramales distintos paralelos y a distinta altura en los que se alojan las poleas. En el ramal superior se sitúan las poleas fijas y en el de abajo las poleas móviles, conjuntamente con la carga.
Por último, es importante señalar que en este tipo de sistema, al igual que la polea móvil, debemos hacer un mayor recorrido con la cuerda; mayor recorrido cuanto mayor es el número de poleas.
Fijas en la siguiente animación. En ella podréis observar como en una polea fija el esfuerzo es idéntico a la resistencia o carga que se desea vencer, mientras que en el caso de una polea móvil tenemos ventaja mecánica, pues el esfuerzo representa la mitad de la resistencia.
Veamos por último un corto vídeo que nos ilustra algunos de los aspectos ya explicados.



 ¡Bájate los archivos !
¡Bájate los archivos !